Self-Supervised Surround-View Depth Estimation with Volumetric Feature Fusion
2022.11.08
36th annual Conference on Neural Information Processing Systems (NeurIPS 2022)에 실린 김중희, 허준화, Tien Nguyen, 정성균 저자의 “Self-supervised surround-view depth estimation with volumetric feature fusion” 논문을 소개합니다. NeurIPS는 세계적인 머신러닝(ML)·AI 학회로 가장 최신의 머신러닝 리서치 기술에 대해 학계와 산업계를 포함한 다양한 연구자들이 참여하여 소개하고 있습니다.
Conference
- 36th annual Conference on Neural Information Processing Systems (NeurIPS 2022)
- NeurIPS is one of the biggest machine learning and artificial intelligence conference, where researchers from both academia and industry gather to share the latest machine learning research.
- The paper “Self-supervised surround-view depth estimation with volumetric feature fusion” written by Jung-Hee Kim, Junwha Hur, Tien Nguyen, Seong-Gyun Jeong, has been accepted to the NeurIPS 2022.
- Click the link below for details.
➠ https://openreview.net/forum?id=0PfIQs-ttQQ
➠ https://github.com/42dot/VFDepth
Publication
- Title: Self-supervised surround-view depth estimation with volumetric feature fusion
- Authors: Jung-Hee Kim, Junhwa Hur, Tien Nguyen, Seong-Gyun Jeong
- Abstract: We present a self-supervised depth estimation approach using a unified volumetric feature fusion for surround-view images. Given a set of surround-view images, our method constructs a volumetric feature map by extracting image feature maps from surround-view images and fuse the feature maps into a shared, unified 3D voxel space. The volumetric feature map then can be used for estimating a depth map at each surround view by projecting it into an image coordinate. A volumetric feature contains 3D information at its local voxel coordinate; thus our method can also synthesize a depth map at arbitrary rotated viewpoints by projecting the volumetric feature map into the target viewpoints. Furthermore, assuming static camera extrinsics in the multi-camera system, we propose to estimate a canonical camera motion from the volumetric feature map. Our method leverages 3D spatio- temporal context to learn metric-scale depth and the canonical camera motion in a self-supervised manner. Our method outperforms the prior arts on DDAD and nuScenes datasets, especially estimating more accurate metric-scale depth and consistent depth between neighboring views.

Jung-Hee Kim | AD Algorithm
I’m in charge of developing 3D vision models for autonomous vehicles.

Active Learning을 통한 지속적인 모델 성능 개선
2026.07.13
.png&w=750&q=75)
42dot LLM 1.3B
2026.07.13
.png&w=750&q=75)
.png&w=750&q=75)
.png&w=750&q=75)
AWS IoT Core Resource Deployment via CDK
2026.07.13
.jpg&w=750&q=75)
ML Data Platform for Continuous Learning
2026.07.13
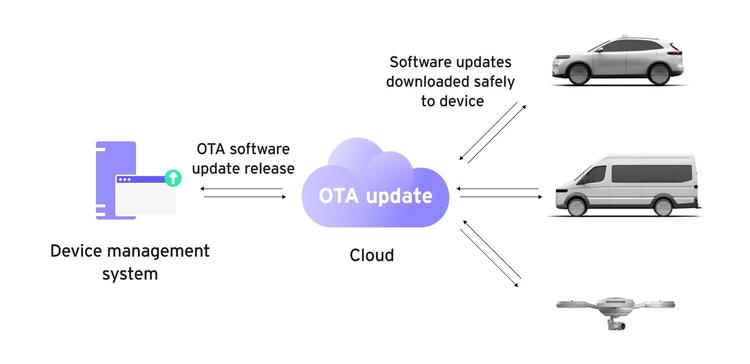
속도와 보안이 강화된 OTA 업데이트
2026.07.13
.png&w=750&q=75)
Foros : 자동차에 합의 알고리즘을?
2026.07.13
.png&w=750&q=75)

42dot이 그리는 미래 모빌리티 세상
2026.07.13